Magnetómetro¶
La actividad va a consistir en crear una brújula electrónica que nos muestre una flecha que siempre apunte al norte geográfico. Dividimos la actividad en dos partes, la primera hacemos que encuentre el rumbo y nos muestre una letra que indique si la orientación es al norte (N), al sur (S), al este (E), o al oeste (O).
Circuito¶
No se requiere de ningún elemento externo por lo que o bien conectamos la micro:bit directamente o bien a través de la placa de expansión.
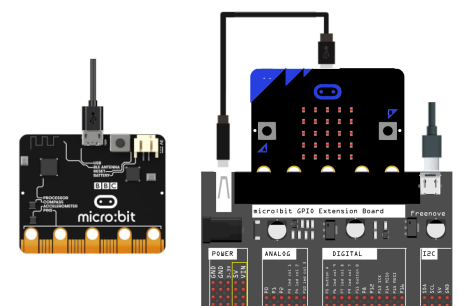
Conexionado de la micro:bit
- Magnetómetro -¶
MicroPython¶
A11-Brújula N,S,E,O¶
El programa, de muy poca precisión es el siguiente:
from microbit import *
compass.calibrate()
while True:
angulo = compass.heading()
if angulo < 45:
display.show("N")
elif angulo < 135:
display.show("E")
elif angulo < 225:
display.show("S")
elif angulo < 315:
display.show("O")
else:
display.show("N")
El programa lo podemos descargar de:
A11-Brújula a 45º¶
Lo que vamos a hacer ahora es localizar las siguientes ocho direcciones, separadas entre si un ángulo de 45º: noroeste (NE), oeste (O), suroeste (SO), sur (S), sureste (SE), este (E), noreste (NE), norte (N). El margen o ángulo que va a englobar cada dirección estará ajustado dentro de otro ángulo de 45º dividido en dos iguales de 22.5º respecto a la dirección principal. Un gráfico nos aclara mejor la idea.
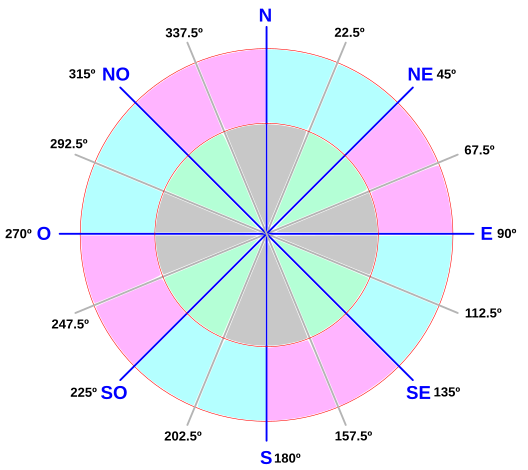
Direcciones a 45º
En lugar de letras ahora utilizaremos las flechas predefinidas.
El programa es:
from microbit import *
compass.calibrate()
while True:
angulo = compass.heading()
if angulo > 22.5 and angulo <= 67.5:
display.show(Image.ARROW_NE)
elif angulo > 67.5 and angulo <= 112.5:
display.show(Image.ARROW_E)
elif angulo > 112.5 and angulo <= 157.5:
display.show(Image.ARROW_SE)
elif angulo > 157.5 and angulo <= 202.5:
display.show(Image.ARROW_S)
elif angulo > 202.5 and angulo <= 247.5:
display.show(Image.ARROW_SW)
elif angulo > 247.5 and angulo <= 292.5:
display.show(Image.ARROW_W)
elif angulo > 292.5 and angulo <= 337.5:
display.show(Image.ARROW_NW)
elif angulo > 337.5 and angulo <= 22.5:
display.show(Image.ARROW_N)
El programa lo podemos descargar de:
MakeCode¶
A11-Brújula N,S,E,O¶
El programa, de muy poca precisión es el siguiente:
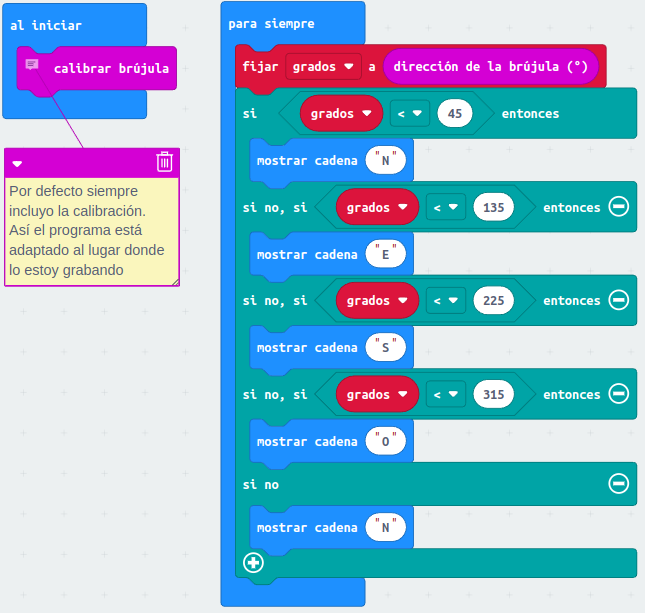
Brújula N,S,E,O
Podemos ver el funcionamiento tanto en el simulador como en la realidad y apreciar la poca precisión que nos ofrece.
El programa lo podemos descargar de:
A11-Brújula a 45º¶
Lo que vamos a hacer ahora es localizar las siguientes ocho direcciones, separadas entre si un ángulo de 45º: noroeste (NE), oeste (O), suroeste (SO), sur (S), sureste (SE), este (E), noreste (NE), norte (N). El margen o ángulo que va a englobar cada dirección estará ajustado dentro de otro ángulo de 45º dividido en dos iguales de 22.5º respecto a la dirección principal. Un gráfico nos aclara mejor la idea.
Direcciones a 45º
En lugar de letras ahora utilizaremos las flechas predefinidas en el bloque correspondiente.
El programa es:
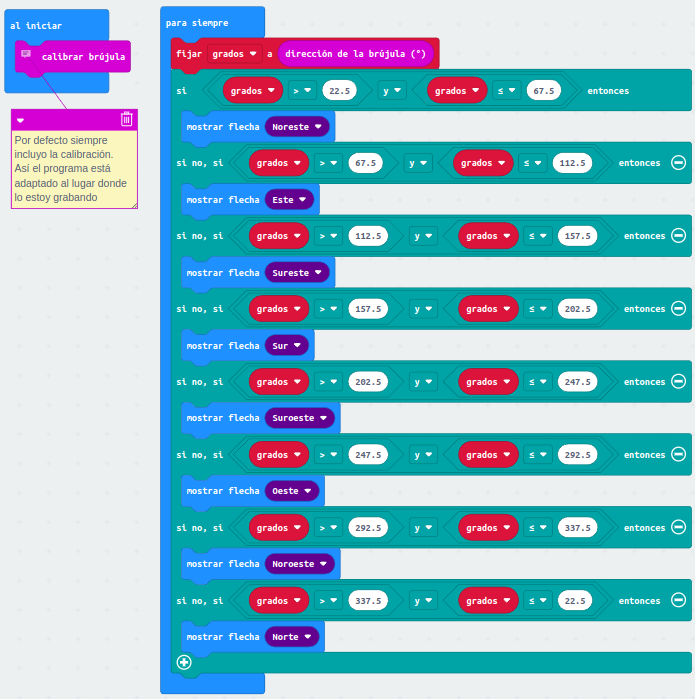
Brújula con direcciones a 45º
El programa lo podemos descargar de:
Editor Mu¶
A11-Brújula N,S,E,O¶
El programa, de muy poca precisión es el siguiente:
from microbit import *
compass.calibrate()
while True:
angulo = compass.heading()
if angulo < 45:
display.show("N")
elif angulo < 135:
display.show("E")
elif angulo < 225:
display.show("S")
elif angulo < 315:
display.show("O")
else:
display.show("N")
El programa lo podemos descargar de:
A11-Brújula a 45º¶
Lo que vamos a hacer ahora es localizar las siguientes ocho direcciones, separadas entre si un ángulo de 45º: noroeste (NE), oeste (O), suroeste (SO), sur (S), sureste (SE), este (E), noreste (NE), norte (N). El margen o ángulo que va a englobar cada dirección estará ajustado dentro de otro ángulo de 45º dividido en dos iguales de 22.5º respecto a la dirección principal. Un gráfico nos aclara mejor la idea.
Direcciones a 45º
En el editor Mu también son válidas las definiciones predefinidas para las flechas.
El programa es:
from microbit import *
compass.calibrate()
while True:
angulo = compass.heading()
if angulo > 22.5 and angulo <= 67.5:
display.show(Image.ARROW_NE)
elif angulo > 67.5 and angulo <= 112.5:
display.show(Image.ARROW_E)
elif angulo > 112.5 and angulo <= 157.5:
display.show(Image.ARROW_SE)
elif angulo > 157.5 and angulo <= 202.5:
display.show(Image.ARROW_S)
elif angulo > 202.5 and angulo <= 247.5:
display.show(Image.ARROW_SW)
elif angulo > 247.5 and angulo <= 292.5:
display.show(Image.ARROW_W)
elif angulo > 292.5 and angulo <= 337.5:
display.show(Image.ARROW_NW)
elif angulo > 337.5 and angulo <= 22.5:
display.show(Image.ARROW_N)
El programa lo podemos descargar de:
- Acelerómetro -¶
Vamos a obtener las medidas de acelaración y ver los resultados en la consola serie. Una segunda actividad va a consistir en implementar un gradiómetro, que es un dispositivo que permite medir una componente del gradiente de un campo magnético. Cuando hablamos de campos magnéticos, gradiente hace referencia a las variaciones de los mismos en periodos de tiempo muy cortos.
MicroPython¶
A11-Aceleraciones¶
El programa lo vamos a hacer en el editor Mu para aprovechar su trazador gráfico.
from microbit import *
while True:
uart.write(str(accelerometer.get_values()) + "\r\n")
sleep(1000)
Ponemos en marcha el trazador, y la comunicación serie REPL después de flashear el programa. Hacemos reset de la micro:bit y podemos ver la evolución de las lecturas con los movimientos de la placa.
Aceleraciones en x, y, z
El programa lo podemos descargar de:
A11-Gradiómetro¶
El programa es:
from microbit import *
# El brillo estara entre 0 y 9
brillo = 9
# La funcion mapear ajusta los valores
# leidos y los lleva al rango 0-4.
def mapear(valor):
if valor < -500:
valor=-500
elif valor > 500:
valor=500
valor=(valor+500)/250
return int(valor)
while True:
# Lee la aceleración en x e y con un
#rango que va de -2000 a 2000.
roll_x = accelerometer.get_x()
pitch_y = accelerometer.get_y()
# No necesitamos un rango tan amplio por
# eso lo bajamos de -500 a 500
x=mapear(roll_x)
y=mapear(pitch_y)
display.clear()
display.set_pixel(x, y, brillo)
sleep(500)
El programa lo podemos descargar de:
MakeCode¶
A11-Aceleraciones¶
El programa para medir la aceleración en los tres ejes es:
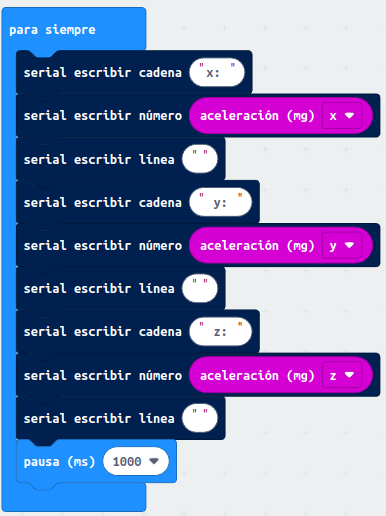
Aceleraciones en x, y, z
Pero lo mejor del programa no es él en si mismo sino ver los resultados tanto de forma gráfica como numérica. Aquí los vemos en la simulación.
Aceleraciones en x, y, z. Simulación
Estos otros corresponden a una placa real.
Aceleraciones en x, y, z. Realidad
El programa lo podemos descargar de:
A11-Gradiómetro¶
El programa lo vemos en la figura siguiente.

Gradiómetro
En la animación vemos el funcionamiento en el simulador.
Gradiómetro en el simulador
El programa lo podemos descargar de:
MicroBlocks¶
A11-Aceleraciones¶
El programa para medir la aceleración en los tres ejes es:
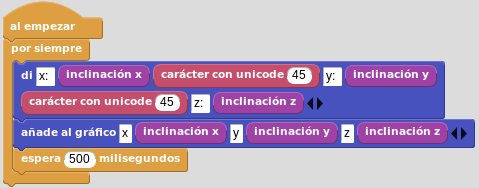
Aceleraciones en x, y, z
El programa en funcionamiento es el siguiente:
Aceleraciones en x, y, z
El programa lo podemos descargar de:
A11-Gradiómetro¶
El programa es:
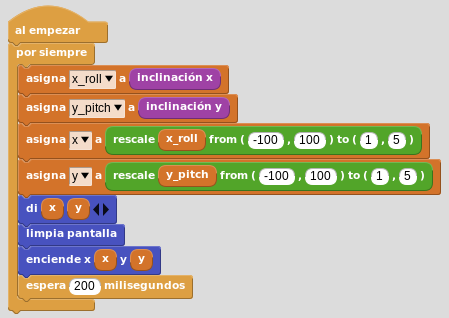
Gradiómetro
El programa lo podemos descargar de: